Lego table test
we programmed the robot to use the light sensor as a way o figuring out where the table ended and stop so it wouldn't fall off
The program
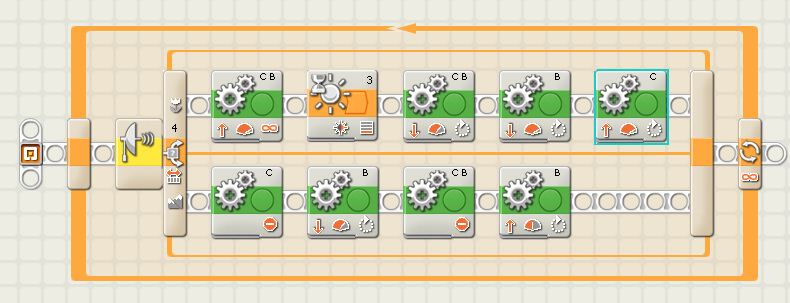
we use the ultra sonic sensor so that if it senses something in front of it it will charge until it hits the edge and then turn around. if there is nothing in front then it will turn back and forth searching for it
Lego sumo battle
this was an exhibition match where our robot was to turn from side to side until it sensed a robot and then charge full speed until it reached the edge of the table and then turn around. because it sensed it at the very beginning and it charged
